a) Si determini la trasformazione canonica individuata da ![]() ,
nella regione
,
nella regione
![]() .
.
b) Si determini la nuova Hamiltoniana.
c) Si determinino le soluzioni delle equazioni del moto per la nuova Hamiltoniana.
d) Le soluzioni ottenute permettono di trovare le soluzioni delle equazioni del moto nelle vecchie variabili?
Soluzione.
a) La funzione generatrice dipende dalle vecchie coordiante e dai nuovi impulsi. Pertanto la traformazione canonica è implicitamente definita da:
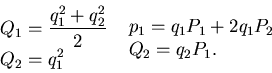 |
(9.5) |
 |
(9.6) |
b) Sostituendo nell'espressione di![]() si ottiene l'hamiltoniana nelle
nuove variabili:
si ottiene l'hamiltoniana nelle
nuove variabili:
c)
La variabile ![]() è ciclica, dunque
è ciclica, dunque ![]() si conserva, e
si conserva, e ![]() si conserva.
Un modo per ottenere la quadratura del moto è di scrivere la
lagrangiana unidimensionale per la variabile
si conserva.
Un modo per ottenere la quadratura del moto è di scrivere la
lagrangiana unidimensionale per la variabile ![]() , pensando
, pensando ![]() come un parametro fissato (un altro
è la soluzione dell'equazione di Hamilton-Jacobi, per separazione
di variabili, o l'ispezione diretta delle equazioni del moto).
Si ottiene
come un parametro fissato (un altro
è la soluzione dell'equazione di Hamilton-Jacobi, per separazione
di variabili, o l'ispezione diretta delle equazioni del moto).
Si ottiene

 ),
quindi non influisce sulle equazioni del moto, e posso elimare
anch'esso.
In definitiva la Lagrangiana che descrive il moto è
),
quindi non influisce sulle equazioni del moto, e posso elimare
anch'esso.
In definitiva la Lagrangiana che descrive il moto è
Il moto di ![]() è descritto da:
è descritto da:
 |
(9.7) |
d)
La trasformazione effettuata è valida solo fino a che
![]() e
e
![]() .
Quindi posso ottenere le soluzioni nelle vecchie
variabili solo fino a quando
.
Quindi posso ottenere le soluzioni nelle vecchie
variabili solo fino a quando
![]() e
e
![]() .
Dalle soluzioni delle equazioni di Hamilton si ottiene:
.
Dalle soluzioni delle equazioni di Hamilton si ottiene:
 |
(9.8) |
Quindi la soluzione trovata non può essere estesa per tutti i tempi nelle vecchie variabili. Per ottenere la soluzioni per tutti i tempi bosogna considerare la trasfrmazione canonica nelle altre regioni dello spazio delle fasi.
Esistono, però, dati iniziali per cui si ottiene
globalemente il moto nelle vecchie variabili.
Sia ad esempio ![]() e consideriamo i moti illimitati in
e consideriamo i moti illimitati in ![]() ,
con
,
con
![]() (che corrispondono a
(che corrispondono a ![]() ).
Allora,
se
).
Allora,
se
![]() , le condizioni per l'invertibilità sono
sempre soddisfatte, infatti:
, le condizioni per l'invertibilità sono
sempre soddisfatte, infatti:

Un'asta omogenea di massa ![]() e lunghezza
e lunghezza ![]() è vincolata
a muoversi su di un piano orizzontale
è vincolata
a muoversi su di un piano orizzontale
![]() .
Sul suo punto medio
.
Sul suo punto medio ![]() è applicata una forza di energia potenziale
è applicata una forza di energia potenziale
Usa come variabili lagrangiane la distanza ![]() di
di ![]() dall'origine
dall'origine
![]() ,
l'angolo
,
l'angolo ![]() che
che ![]() forma con l'asse delle
forma con l'asse delle ![]() , e l'angolo
, e l'angolo ![]() che l'asta forma con l'asse delle
che l'asta forma con l'asse delle ![]() .
.
a) Scrivi la Lagrangiana e l'Hamiltoniana;
b) risolvi l'equazione di Hamilton-Jacobi per separazione di variabili;
c) considera il dato iniziale
 |
(9.9) |
d) Sia ora
![]() . Trova un valore di
. Trova un valore di ![]() per
cui il moto è periodico.
per
cui il moto è periodico.
In un piano verticale è posto un disco omogeneo di centro ![]() , masa
, masa
![]() e raggio
e raggio ![]() , che rotola senza strisciare lungo un asse orizzontale
, che rotola senza strisciare lungo un asse orizzontale
![]() . In tale piano è posta un'asta omogenea pesante di massa
. In tale piano è posta un'asta omogenea pesante di massa ![]() e lunghezza
e lunghezza ![]() ed i cui estremi
ed i cui estremi ![]() e
e ![]() sono obbligati a scorrere
senza attrito lungo una guida liscia solidale alla circonferenza
del disco.
sono obbligati a scorrere
senza attrito lungo una guida liscia solidale alla circonferenza
del disco.
Scegliamo come variabili Lagrangiane l'ascisa ![]() del centro del
disco e l'angolo
del centro del
disco e l'angolo ![]() che
che ![]() forma con la verticale
discendente, ove
forma con la verticale
discendente, ove ![]() è il punto di mezzo dell'asta
è il punto di mezzo dell'asta ![]() .
.
a) Scrivere le equazioni del moto con il metodo di Lagrange.
b) Trovare due integrali primi e, tramite questi, considerando le seguenti condizioni inizilali:
c) Scrivere prima l'Hamiltoniana e poi l'equazione di Hamilton-Jacobi.
d) (aggiunto) Risolvere per separazione di variabili l'equazione di Hamilton-Jacobi. Esiste una regione nello spazio delle fasi in cui il motot può essere descritto in variabile azione-angolo?
Data la Lagrangiana
a) Scrivere la corrispondente Hamiltoniana e le equazioni di Hamilton.
b) Scirvere l'equazione di Hamilton-Jacobi relativa a tale Hamiltoniana e riportare il moto del sistema alle quadrature.
c) Scrivere l'energia meccanica totale corrispondente alla
Lagrangiana ![]() . Utilizzando la conservazione dell'energia,
riportare il sistema alle quadrature. Confrontare il risultato
con quanto ottenuto mediante l'equazione di Hamilton-Jacobi.
. Utilizzando la conservazione dell'energia,
riportare il sistema alle quadrature. Confrontare il risultato
con quanto ottenuto mediante l'equazione di Hamilton-Jacobi.
Si consideri il sistema di equazioni differenziali
 |
(9.10) |
a) Si riconosca che il sistema è hamiltoniano.
b) Si risolva il sistema usando il metodo di Hamilton-Jacobi.
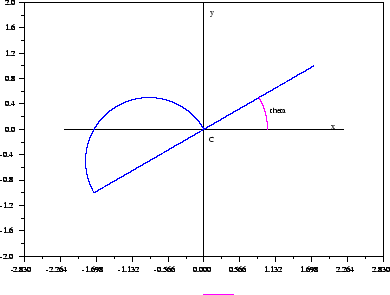
Un corpo rigido è formato da un semidisco omogeneo di massa ![]() e raggio
e raggio
![]() e da un'asta di massa
e da un'asta di massa ![]() e lunghezza
e lunghezza ![]() .
Esso è vicolato da una cerniera a ruotare attorno a
.
Esso è vicolato da una cerniera a ruotare attorno a ![]() in un piano
verticale, e sia
in un piano
verticale, e sia ![]() l'angolo che l'asta forma con l'asse
(vedi figura).
l'angolo che l'asta forma con l'asse
(vedi figura).
a) Scirvere la Lagrangiana e mostrare che essa assume la forma
b) Determinata l'Hamiltoniana, scrivere l'equazione di Hamilton-Jacobi e risolvere il problema della dinamica del corpo riportando tale equazione alle quadrature.
c) Dire sotto quali condizioni la posizione ![]() è di equilibrio.
AQl di fuori di tali condizioni studiare il moto del corpo con
condizioni iniziali
è di equilibrio.
AQl di fuori di tali condizioni studiare il moto del corpo con
condizioni iniziali
![]() .
Specificare se la rotazione avviene inizialemente in senso orario o
antiorario, se esiste un tempo
.
Specificare se la rotazione avviene inizialemente in senso orario o
antiorario, se esiste un tempo ![]() in cui l'asta raggiunge una posizione
verticale ed in tal caso determinare l'espressione di tale tempo
in cui l'asta raggiunge una posizione
verticale ed in tal caso determinare l'espressione di tale tempo ![]() .
.
Una particella puntiforme di massa ![]() si muove nel piano
sotto l'azione di una forza conservativa di energia potenziale
si muove nel piano
sotto l'azione di una forza conservativa di energia potenziale
Si supponga che, all'istante ![]() , indicando con
, indicando con ![]() l'angolo polare rispetto all'origine:
l'angolo polare rispetto all'origine: